Cheap contact
One of the expensive elements to add to a machine is the ability to feel its environment.
Nature really can generate cheap simple sensing. Animal bodies are covered in a plethora of sensors to sense temperature, touch and vibration. On our fingers the density of our feeling of touch is sub-millimetre.
To recreate so many sensory inputs has proved prohibitively expensive, even at costs as low as 50 cents a switch, the thousands of them required adds up to quite a cost. That's before you’ve even wired them up. Even though each switch is relatively simple in its own way you have to make them one at a time, injection moulding parts and adding whatever spring mechanism you need on every switch.
I’ve been considering building a robotic arm from scratch recently and I’ve been giving some thought to the complexity of the button.
All you really need is some contact and some mechanism for keeping that contact apart when not touched.
My idea is to use PCB boards to encompass the wiring complexity, a fabric over the top of one side that is glued to the board in between where the contacts are on the surface of the PCB.
The spring mechanism is then provided by air pressure.
The idea is that with a scanning setup not dissimilar to what is used by cameras and screens it should be possible to with a single diode per contact. With diodes costing as little as 5 cents a diode, we are getting cheaper still.
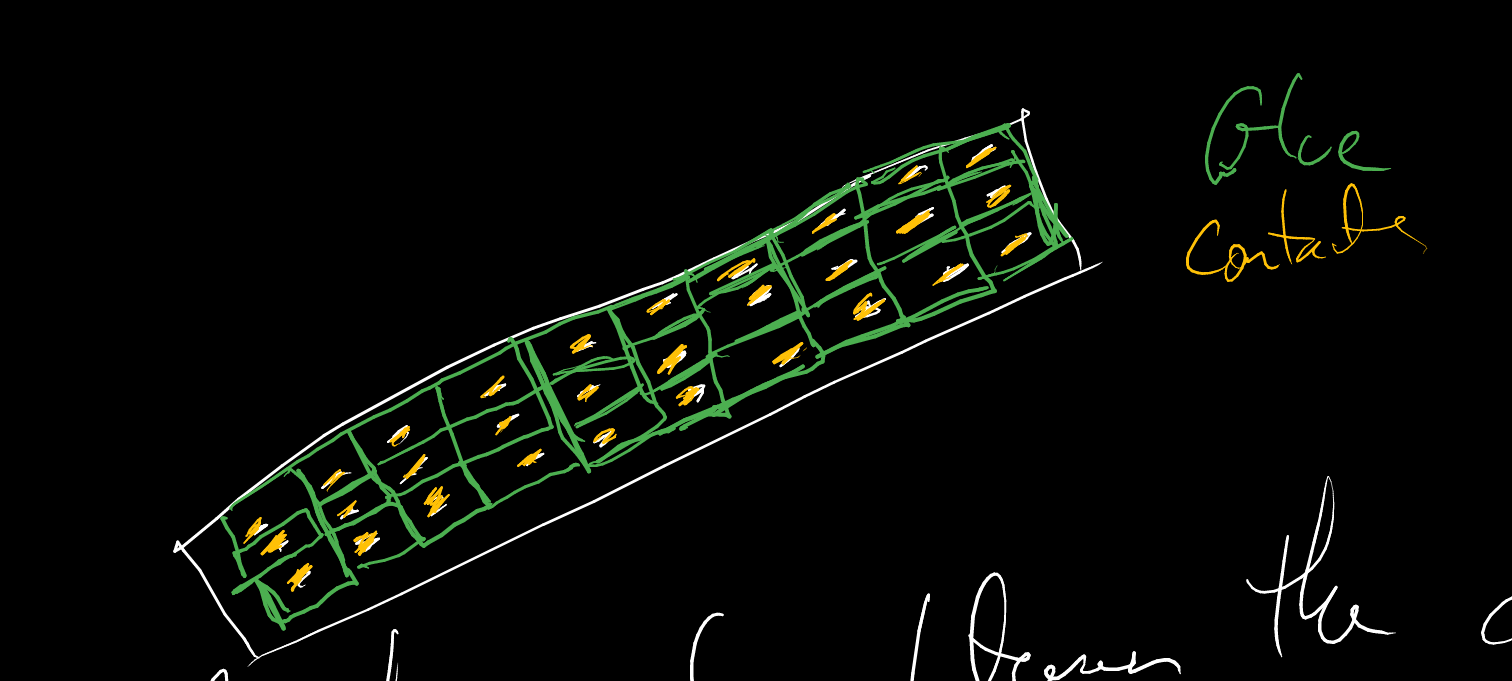
The circuit diagram would look a little like the following, thankfully the complexity is mainly managed in the PCB with the horizontal sections being copper runners on the bottom of the covering fabric. Because of the use of the multiplexor for the row output we have compressed the system to 4 output and 4 input pins for a total of 16x4 = 64 contacts.



Comments
Post a Comment